Encuentra tu pasión a solo 4,17 US$/mes | Aprende Robótica, IA e IOT.
¡Oferta!

Robótica con Matlab : Robot manipulador de 4DOF
El precio original era: $89.99.$19.99El precio actual es: $19.99.
Cinemática, Jacobiano, Control basado en Lyapunov, Control basado en el espacio nulo, Prevención de singularidad.
 Vídeos de máxima calidad para que no pierdas ningún detalle.
Vídeos de máxima calidad para que no pierdas ningún detalle.
Tiene acceso de por vida, puedes ver el curso una y otra vez.
Puede descargar los recursos y códigos.
Acceso gratuito a nuevas actualizaciones.
Expón tus dudas en la plataforma, responderé dentro de las 48 horas laborales.
Responderé tus dudas por WhatsApp por 1 mes.
Por $9.99 adicional recibe 1 sesión en vivo exclusiva para ti y acceso al grupo privado de WhatsApp (Precio real $30USD)
-
¡Oferta!
Robótica Moderna: Cinemática y Control de Robots
El precio original era: $79.99.$14.99El precio actual es: $14.99. -
¡Oferta!
Robótica móvil para principiantes con ESP32
El precio original era: $89.99.$12.99El precio actual es: $12.99. -
¡Oferta!
Visión por computador con OpenCV y Python: Control de robots
El precio original era: $89.99.$29.99El precio actual es: $29.99.
Productos relacionados
-
¡Oferta!
Introducción al control de robots móviles
El precio original era: $167.00.$34.99El precio actual es: $34.99. -
¡Oferta!
Empezando en ESP32: Desarrolla proyectos IoT desde cero
El precio original era: $19.99.$12.99El precio actual es: $12.99. -
¡Oferta!

Robot SCARA: Automatización de tareas repetitivas
El precio original era: $79.99.$19.99El precio actual es: $19.99. -
¡Oferta!
Mega Paquete Roboticoss : Robótica, IOT e Inteligencia Artificial
El precio original era: $367.00.$99.00El precio actual es: $99.00.
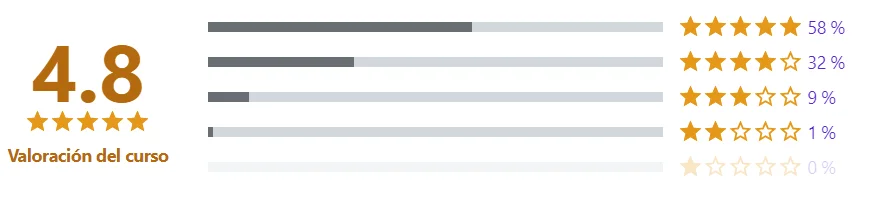
Valoraciones
No hay valoraciones aún.