Ir al contenido
Encuentra tu pasión
a solo 4,17 US$/mes
| Aprende Robótica, IA e IOT.
Obtener oferta
$
0.00
0
Carrito
Inicio
Webinar Gratuito
Kits
Proyectos
Cursos
Inicio
Webinar Gratuito
Kits
Proyectos
Cursos
Modelo y Control Dinámico del Robot Bosch SR-800
$
0.00
En este proyecto se implementa un control basado en dinámica inversa usando el modelo de un Robot Manipulador Bosch SR-800
Categoría:
Descargas
Pago seguro garantizado
somdn_product_page
Descargar Ahora
Productos relacionados
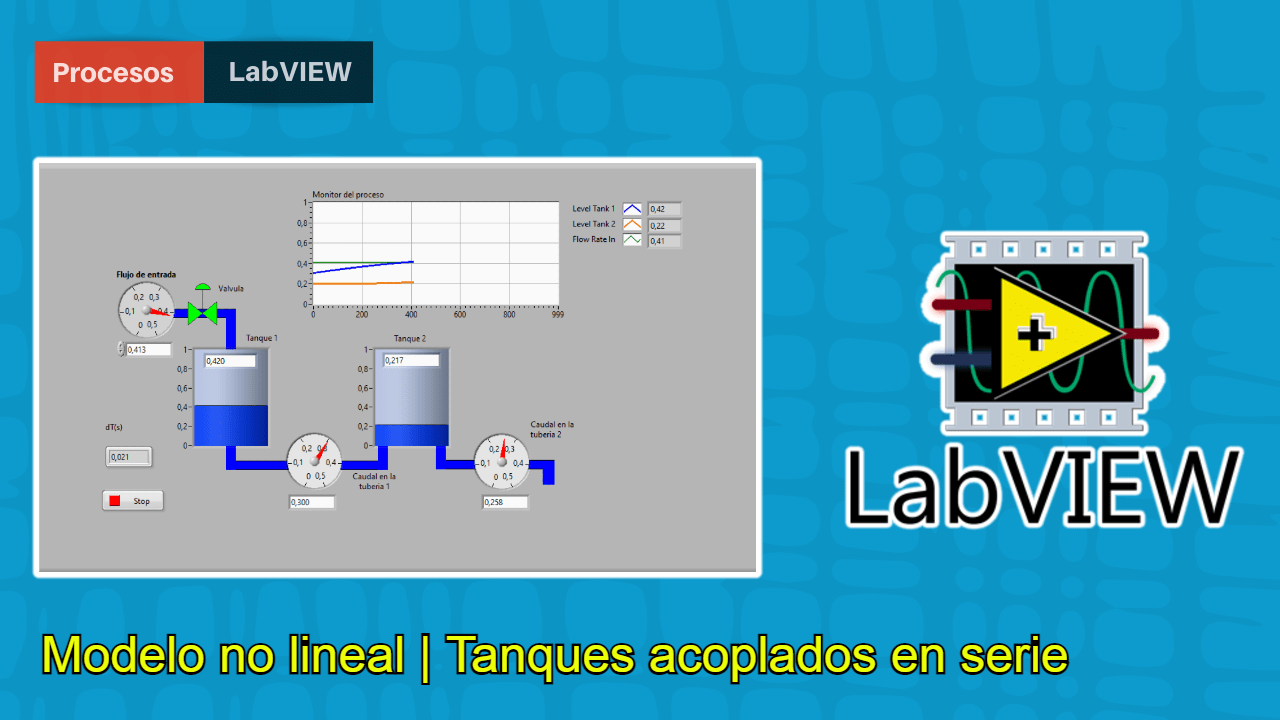
Modelo de un sistema de dos tanques acoplados en serie y simulación en LabVIEW
$
0.00
Control de posición de vehículos aéreos no tripulados con Python
$
0.00
Control de Motor y Lectura de RPM
$
0.00
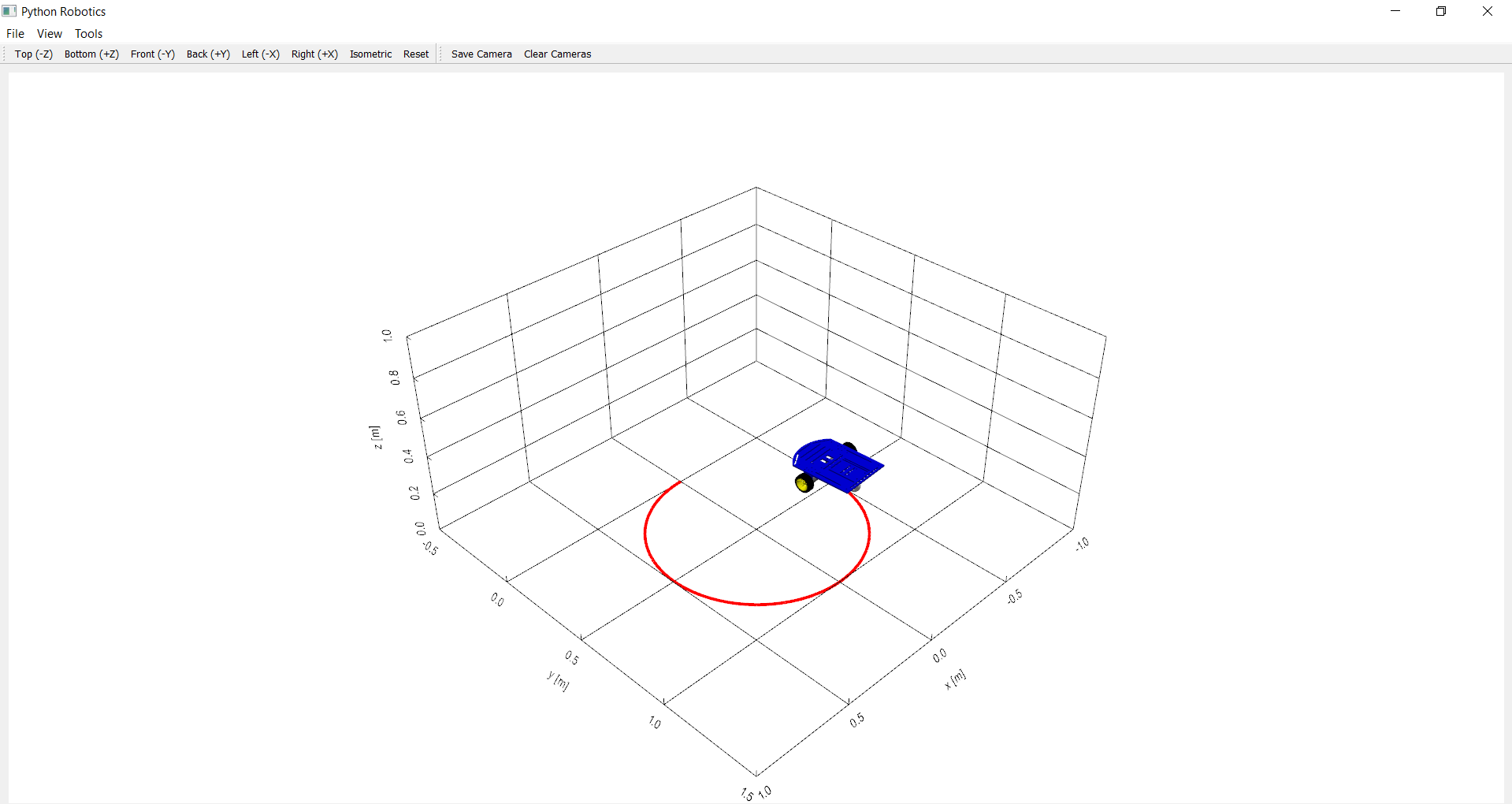
Robótica con Python : Modelo cinemático
$
0.00
Ingrese a su cuenta
Nombre de usuario o correo electrónico
Contraseña
Recuérdame
Iniciar sesión
¿Olvidó su contraseña?
|
Registrarse
Usamos cookies para asegurar que te damos la mejor experiencia en nuestra web. Si continúas usando este sitio, asumiremos que estás de acuerdo con ello.
Aceptar
Política de privacidad