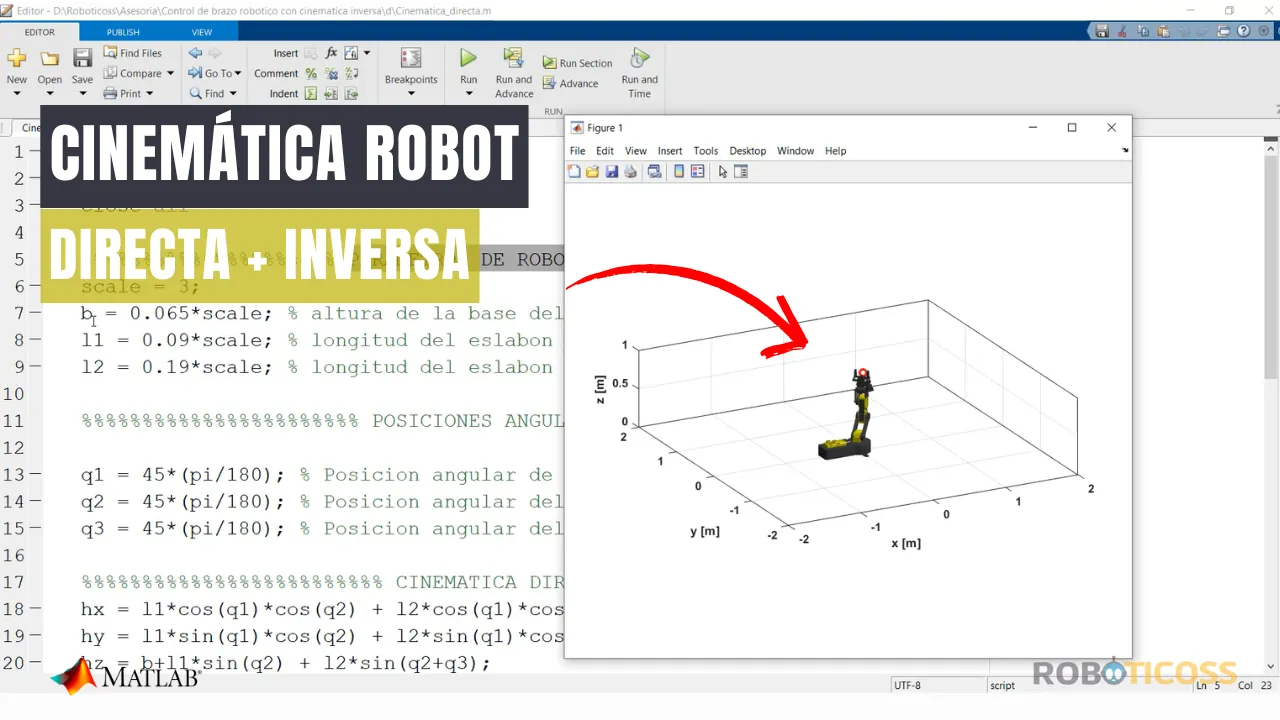
Explora el funcionamiento completo de un robot manipulador de 3 grados de libertad. Aprende y visualiza la diferencia entre la cinemática directa e inversa mediante MATLAB y un simulador 3D. Ideal para comprender los fundamentos de la robótica moderna.