Encuentra tu pasión a solo 4,17 US$/mes | Aprende Robótica, IA e IOT.

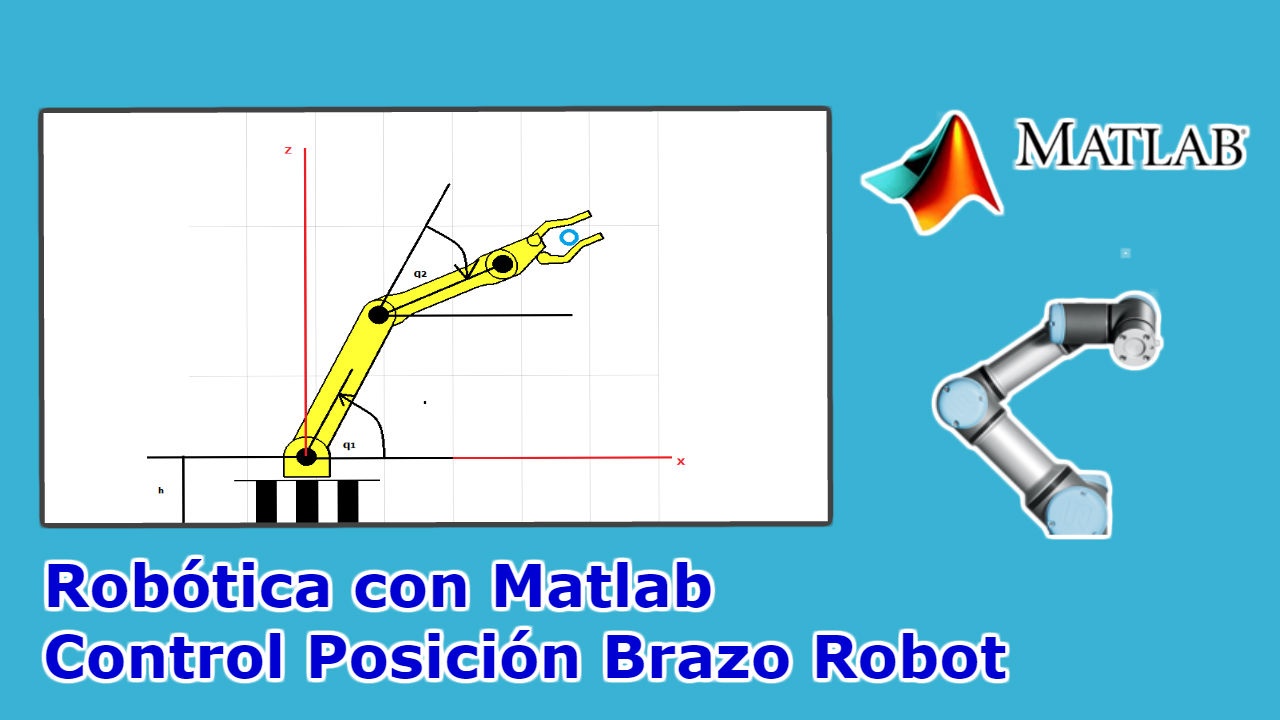
Control de trayectoria de un brazo basado en Métodos Numéricos
$0.00
En este proyecto se presenta el diseño de un algoritmo de control de un brazo robotico de 2DOF utilizando métodos numéricos. Este tipo de control es fácil de implementar en un arduino, pic u otro dispositivo digital.

Valoraciones
No hay valoraciones aún.