Mano Robótica Controlada por Visión Artificial
Descarga tu Mano Robótica Controlada por Visión Artificial y monta un proyecto funcional que imita los movimientos de tu mano en tiempo real.
Programación
A continuación, te mostramos cómo conectar cada componente paso a paso.o.
A continuación, te mostramos cómo conectar cada componente paso a paso.o.
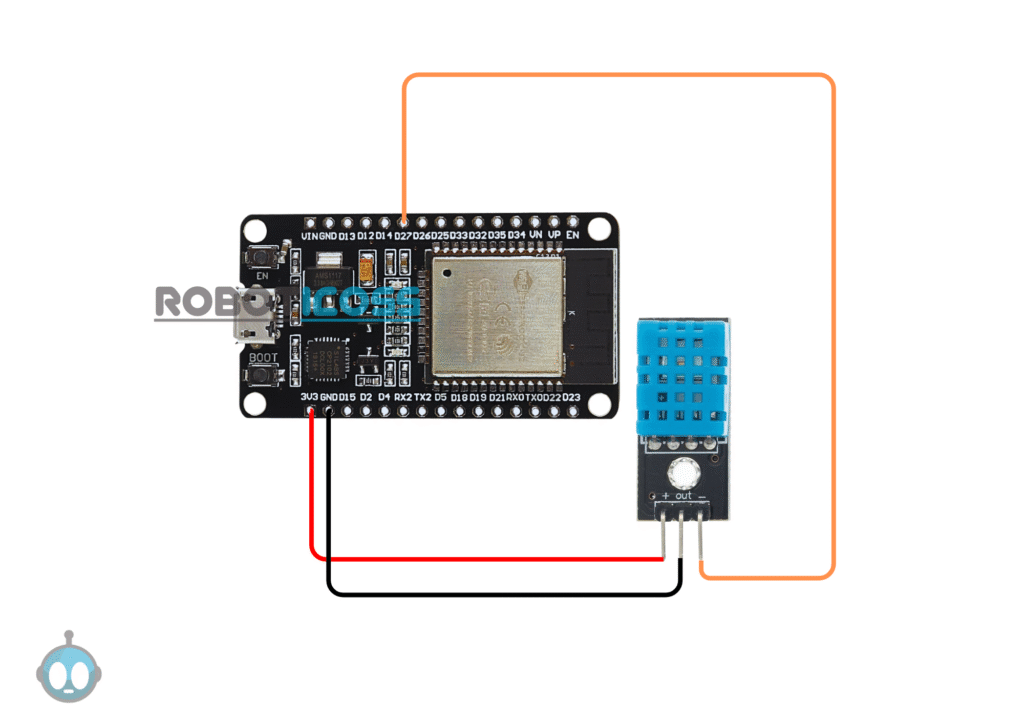
Paso 1: Identifica los pines del sensor DHT11
Explicación: El DHT11 tiene tres pines principales: VCC, DATA y GND. Verifica su disposición, que suele estar impresa en el módulo o en su hoja técnica.
Código
A continuación, te mostramos cómo conectar cada componente paso a paso.o.
Paso 1: Identifica los pines del sensor DHT11
Explicación: El DHT11 tiene tres pines principales: VCC, DATA y GND. Verifica su disposición, que suele estar impresa en el módulo o en su hoja técnica.
Paso 2: Conecta el pin VCC del DHT11 al pin 3.3V del ESP32
Explicación: El pin VCC del sensor debe ir al pin de 3.3V del ESP32 para que reciba la alimentación necesaria para funcionar correctamente.
Paso 3: Conecta el pin GND del DHT11 al pin GND del ESP32
Explicación: Une el pin de tierra del sensor al GND del ESP32 para establecer la referencia común entre ambos dispositivos.
Paso 4: Conecta el pin DATA del DHT11 al GPIO 27 del ESP32
Explicación: El pin de datos del DHT11 debe conectarse al GPIO 27 del ESP32. Este pin se usará para leer la temperatura desde el código cargado en el microcontrolador.
Paso 5: Revisa todas las conexiones antes de encender el sistema
Explicación: Asegúrate de que todos los cables estén bien insertados en la protoboard y que no haya cables sueltos o mal ubicados, ya que esto puede afectar el funcionamiento del proyecto.
Nota: Si el GPIO 27 te queda incómodo en la protoboard, puedes usar el GPIO 4. Solo cambia el número de pin en el código.