Encuentra tu pasión a solo 4,17 US$/mes | Aprende Robótica, IA e IOT.
¡Oferta!

Visión por computador con OpenCV y Python: Control de robots
El precio original era: $89.99.$29.99El precio actual es: $29.99.
Robótica, Arduino, Detección de objetos, Aprende a detectar tus propios objetos, Robot seguidor de objetos.
-
¡Oferta!
Robótica Moderna: Cinemática y Control de Robots
El precio original era: $79.99.$14.99El precio actual es: $14.99. -
¡Oferta!
Aprendizaje Automático para microcontroladores Arduino y ESPXX con Tensorflow
El precio original era: $89.99.$12.99El precio actual es: $12.99. -
¡Oferta!

Domina Internet de las Cosas con ESP32: Curso Completo para Principiantes
El precio original era: $79.99.$14.99El precio actual es: $14.99.
Productos relacionados
-
¡Oferta!

Visión Artificial: Control de Robots Móviles
El precio original era: $89.99.$29.99El precio actual es: $29.99. -
-
¡Oferta!

Robot móvil diferencial: Navegación Autónoma
El precio original era: $89.99.$29.99El precio actual es: $29.99. -
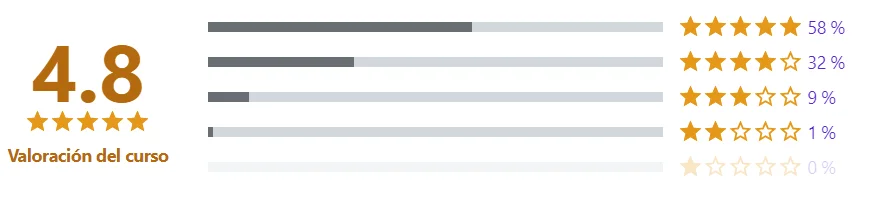
Valoraciones
No hay valoraciones aún.