Explora el funcionamiento completo de un robot manipulador de 3 grados de libertad. Aprende y visualiza la diferencia entre la cinemática directa e inversa mediante MATLAB y un simulador 3D. Ideal para comprender los fundamentos de la robótica moderna.
🎓 ¿Para quién es este proyecto?
👨🎓 Estudiantes de ingeniería, robótica o mecatrónica.
👩🏫 Docentes que deseen material de apoyo para sus clases.
🤖 Aficionados y makers interesados en simulación de robots.
💡 Personas que busquen aprender modelado y control en MATLAB.
🧰 Incluye en los archivos descargables:
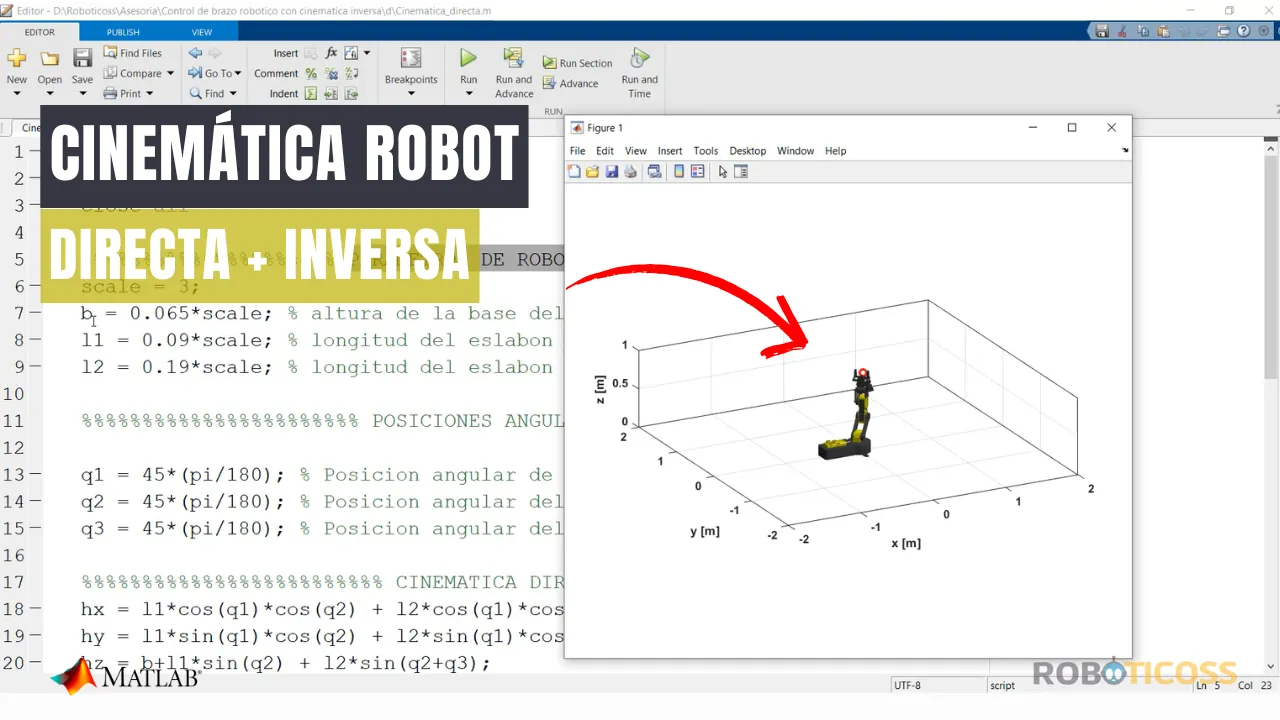
🧩 Simulador del robot 3DOF.
📘 Código de MATLAB de cinemática directa.
📗 Código de MATLAB de cinemática inversa.
💬 Acceso a soporte técnico y comunidad privada.
🎥 Video tutorial explicativo disponible en esta misma página.
1
¿Tienes preguntas? ¡Chatea con nosotros!
Ingrese a su cuenta
Usamos cookies para asegurar que te damos la mejor experiencia en nuestra web. Si continúas usando este sitio, asumiremos que estás de acuerdo con ello.