Encuentra tu pasión a solo 4,17 US$/mes | Aprende Robótica, IA e IOT.
Actuadores para Robótica

En robótica, los actuadores son componentes mecánicos que convierten la energía en movimiento. En otras palabras, los actuadores son los motores que permiten a los robots moverse y realizar acciones, es decir, sin actuadores, los robots son un montón inmóvil de metal, plástico u otro material que se utilice en su fabricación.
Los actuadores dan vida a los mecanismos: algunos los mueven, otros giran sus articulaciones o permiten a los efectores finales, por ejemplo, levantar objetos. Por lo tanto, elegir el actuador adecuado para el robot es de suma importancia para su éxito.
Ahora, las ofertas del mercado de actuadores para robótica pueden hacer que su cabeza dé vueltas fácilmente, con tantos diseños y principios de funcionamiento diferentes. Sin embargo, la mayoría emplea uno de los tres tipos de actuación :
- Neumático
- Hidráulico
- Eléctrico
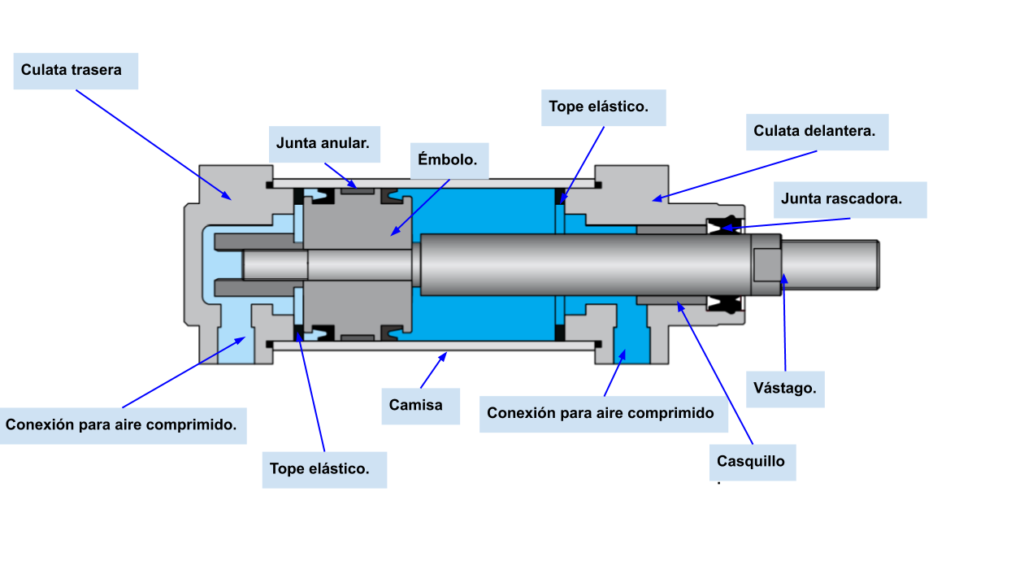
Actuador neumático
Los actuadores neumáticos son una opción popular debido a su bajo costo, fácil mantenimiento y su alta velocidad y fuerza de salida. Además, son fáciles de controlar y pueden ser utilizados en entornos peligrosos, ya que no generan chispas ni calor, pero son inferiores en precisión de control de velocidad y posición.
Los usos más comunes de los actuadores neumáticos en la robótica son:
- Movimiento lineal: Los actuadores neumáticos pueden generar movimientos lineales en robots, como el desplazamiento de una herramienta de soldadura o el movimiento de un brazo robótico.
- Operaciones de sujeción: Los actuadores neumáticos también se utilizan en la operación de sujeción en robots. Se pueden utilizar para sujetar o soltar piezas, sujetar materiales para procesos de fabricación, y otros procesos.
- Accionamiento de válvulas: Los actuadores neumáticos son útiles para accionar válvulas en sistemas hidráulicos y neumáticos en robots.
- Operaciones de corte: Los actuadores neumáticos se utilizan en el corte de materiales en la robótica, como el corte de plástico o metales.
- Control de movimiento: Los actuadores neumáticos son una opción común para controlar el movimiento de los robots en una línea de producción.
Actuador hidráulico
Los actuadores hidráulicos son de su interés si su robot es grande o se supone que debe manejar grandes cargas útiles. Su funcionamiento se basa en transformar la energía de un fluido en trabajo mecánico mediante bombeo.
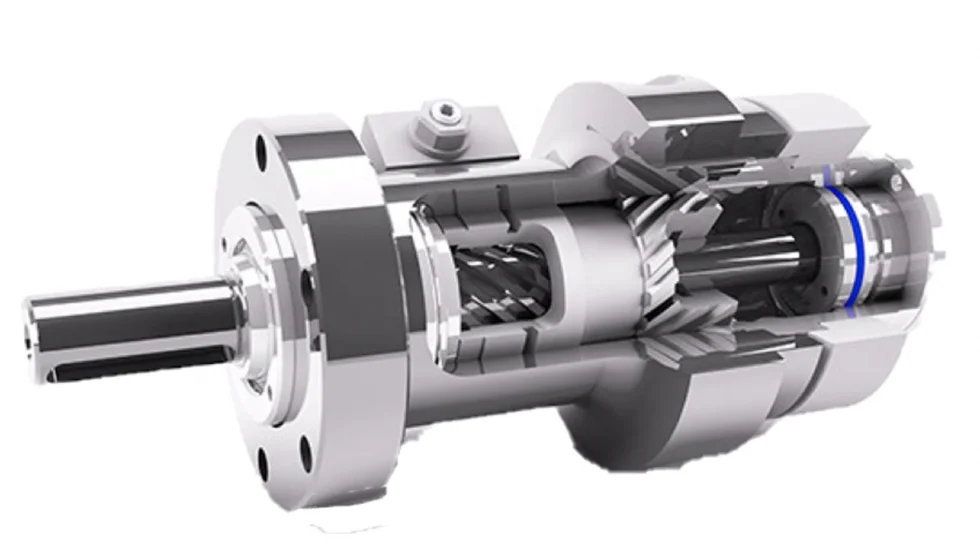
Aunque los mecanismos hidráulicos garantizan una coordinación precisa de la velocidad y el movimiento y tienen una relación potencia-peso adecuada, son ruidosos y voluminosos. También existen riesgos asociados con fugas o con el fluido de servicio que cambia sus propiedades con las variaciones de temperatura.
Los actuadores hidráulicos se utilizan en la robótica debido a su capacidad para generar una gran cantidad de fuerza en un espacio compacto. A continuación, te presento algunas de las aplicaciones más comunes de los actuadores hidráulicos en la robótica:
- Brazos robóticos: Los actuadores hidráulicos se utilizan en la construcción de brazos robóticos, para proporcionar la fuerza necesaria para levantar y manipular objetos pesados.
- Movimiento de ruedas: Los actuadores hidráulicos se utilizan en robots móviles, para proporcionar la fuerza necesaria para el movimiento de las ruedas.
- Operaciones de sujeción: Los actuadores hidráulicos se utilizan para sujetar objetos y materiales en la fabricación de productos y en procesos de ensamblaje.
- Manipulación de materiales: Los actuadores hidráulicos se utilizan en la manipulación de materiales, como en la clasificación de objetos por tamaño y forma.
- Operaciones de corte y soldadura: Los actuadores hidráulicos se utilizan en la operación de corte y soldadura en la fabricación de productos.
- Industria pesada: Los actuadores hidráulicos son comunes en la industria pesada, como en la minería y la construcción, donde se requiere una gran cantidad de fuerza para realizar tareas específicas.
Motores eléctricos
Los motores eléctricos son actuadores electromecánicos que producen movimiento al convertir la energía eléctrica en energía mecánica. Estos actuadores son la opción preferida en robótica, lo que se debe a varias razones:
- La electricidad es una fuente de suministro ampliamente disponible.
- Estos mecanismos son adecuados para todos los tamaños de robot.
- Son compactos y livianos, pero cuentan con una gran relación de conversión de potencia, excelente precisión y repetibilidad.
- La contaminación (p. ej., por fugas) en el entorno de trabajo es cero.
- Los sistemas de accionamiento eléctrico son robustos y fáciles de mantener.
En cuanto a sus limitaciones, los motores eléctricos no son intrínsecamente seguros, lo que perjudica su uso en atmósferas explosivas. Además, a menudo requieren un sistema de comando complejo para regular el movimiento.
Tipos de motores
Existen varios tipos de motores, cada uno con sus propias características y aplicaciones. A continuación, se presentan algunos de los tipos más comunes de motores.
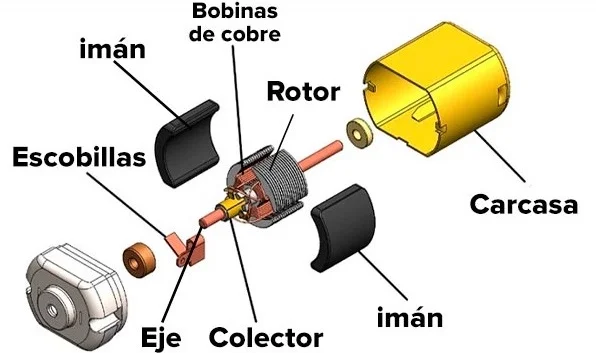
Motores DC con escobillas
Los motores con escobillas, como indica su nombre, utilizan escobillas conectadas a un colector para realizar el cambio de polaridad en el rotor. Estas escobillas son, por tanto, las encargadas de conmutar mecánicamente la corriente de las bobinas del motor.
De entrada, el motor con escobillas es más económico, asimismo, no necesita un control electrónico para su funcionamiento, a través de un circuito caro y complejo.
Aprende robótica ahora
En la robótica, cada error es una oportunidad para aprender y mejorar
50
%
Off
El ciclo de vida de los motores con escobillas es menor comparado a otros motores debido a que genera mayor fricción al realizar el cambio de polaridad, y desprende calor y chispas, por lo que las escobillas acaban deteriorándose y deben ser reemplazadas, lo que requiere un mayor mantenimiento, con los costes que pueda conllevar.
Aplicaciones de los motores con escobillas
Aunque los motores con escobillas han perdido popularidad frente a los motores brushless y los motores paso a paso, todavía tienen algunas aplicaciones en la robótica. Algunas de las aplicaciones comunes de los motores con escobillas en la robótica incluyen:
- Robots de bajo costo: Los motores con escobillas son generalmente más baratos que los motores brushless y los motores paso a paso, por lo que todavía se utilizan en robots de bajo costo.
- Robots de juguete: Los motores con escobillas se utilizan a menudo en robots de juguete debido a su bajo costo y facilidad de control.
- Pequeñas máquinas de precisión: Los motores con escobillas se utilizan a veces en pequeñas máquinas de precisión, como relojes y cámaras, debido a su tamaño compacto y bajo costo.
- Robots educativos: Los motores con escobillas se utilizan a menudo en robots educativos para enseñar a los estudiantes los fundamentos de la robótica.
Motores DC sin escobillas
Los motores de CC sin escobilla (motores BLDC) son motores conmutados electrónicamente. Los motores BLDC tienen la característica de que no emplean escobillas en la conmutación para la transferencia de energía; en este caso, la conmutación se realiza electrónicamente. Esta propiedad elimina el gran problema que poseen los motores eléctricos convencionales con escobillas, los cuales producen rozamiento, disminuyen el rendimiento, desprenden calor, son ruidosos y requieren una sustitución periódica.

Además, estos motores también ofrecen algunas otras ventajas:
- Pueden funcionar a velocidades más altas (hasta 100.000 revoluciones por minuto en comparación con las 20.000 revoluciones por minuto de los motores con escobillas).
- Su vida útil es más larga (más de 10.000 horas de funcionamiento).
- Son más fiables y eficientes.
- No existe desgaste en las piezas, excepto en los rodamientos, lo que reduce las operaciones de mantenimiento.
No obstante, presentan algunas desventajas:
- El coste inicial es alto puesto que es necesario integrar un dispositivo de conmutación exclusivo (controlador).
- Por lo general, también requieren un reductor en aplicaciones de transmisión.
Aplicaciones de los motores sin escobillas
Los motores brushless (sin escobillas) se han convertido en una opción popular en la robótica debido a su eficiencia energética, alta velocidad y capacidad de control preciso de la posición. Algunas de las aplicaciones comunes de los motores brushless en la robótica incluyen:
- Vehículos robóticos: La relación de par, peso y volumen es única y es perfecta para UAVs (vehículos aéreos no tripulados) y robots terrestres.
- Manipulación de brazos robóticos: Los motores brushless son ideales para controlar los movimientos precisos de los brazos robóticos. Su capacidad de aceleración rápida y velocidad constante permiten una manipulación precisa de los objetos.
- Exoesqueletos: Los exoesqueletos robóticos utilizan motores brushless para proporcionar la energía necesaria para mover las articulaciones y aumentar la fuerza muscular.
- Sistemas de control de movimiento: Los motores brushless se utilizan a menudo en los sistemas de control de movimiento para proporcionar un control preciso y eficiente de la velocidad y posición de los robots.
- Robots colaborativos: Los motores brushless son una opción popular en los robots colaborativos debido a su capacidad para trabajar junto a los seres humanos con una alta precisión de movimiento y bajo nivel de ruido.
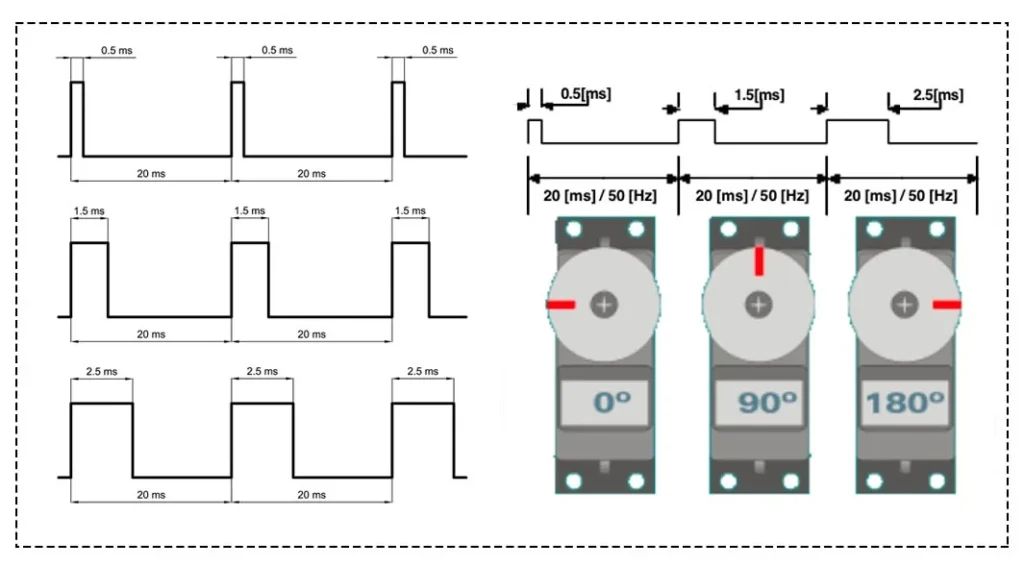
Servomotores
Un servomotor es un actuador rotativo o motor que permite un control preciso en términos de posición angular, aceleración y velocidad, capacidades que un motor normal no tiene. En definitiva, utiliza un motor normal y lo combina con un sensor para la retroalimentación de posición.
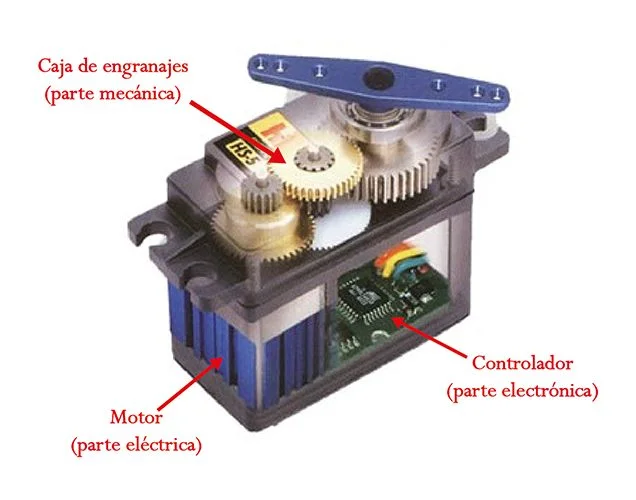
Pero, los servomotores no son en realidad una clase específica de motor, sino una combinación de piezas específicas, que incluyen un motor de corriente continua o alterna, y son adecuados para su uso en un sistema de control de bucle cerrado.
Por lo que una definición más exacta de un servomotor sería la de un servomecanismo de bucle cerrado que utiliza la retroalimentación de posición para controlar su velocidad de rotación y posición. La señal de control es la entrada, ya sea analógica o digital, que representa el comando de posición final para el eje.
Aplicaciones de los servomotores
Los servomotores son ampliamente utilizados en robótica debido a sus excelentes características de control de posición y velocidad, así como su capacidad para proporcionar un alto torque en un tamaño compacto. Aquí hay algunas aplicaciones comunes de servomotores en robótica:
- Robots industriales: Los servomotores se utilizan a menudo en robots industriales para proporcionar un control preciso del movimiento y la posición.
- Robots móviles: Los servomotores se utilizan en robots móviles para proporcionar un control preciso de la dirección y la velocidad.
- Robots de inspección: Los servomotores se utilizan a menudo en robots de inspección para proporcionar un movimiento preciso y controlado de las cámaras y los sensores.
- Robots de seguridad: Los servomotores se utilizan en los robots de seguridad para proporcionar una respuesta rápida y precisa en situaciones de emergencia.
- Robots de entretenimiento: Los servomotores se utilizan a menudo en los robots de entretenimiento, como los robots humanoides, para proporcionar movimientos realistas y precisos.
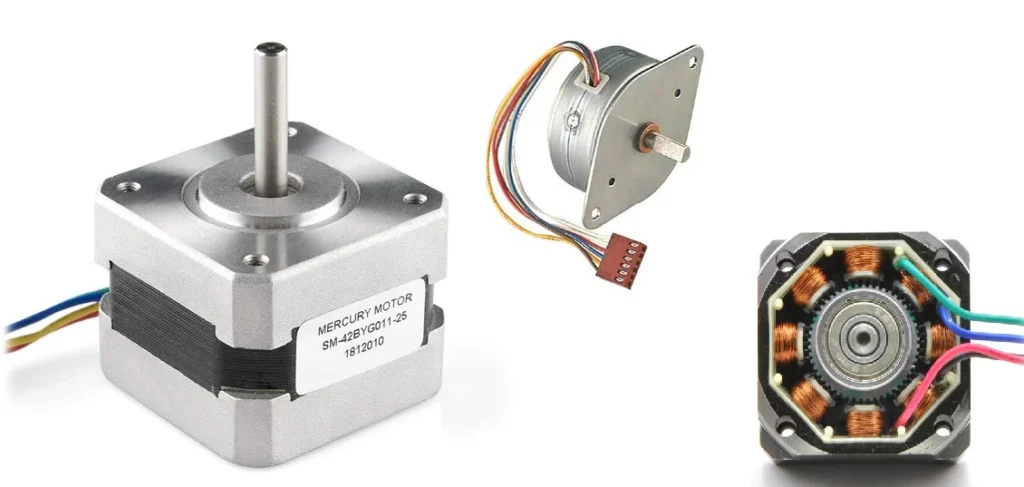
Motor paso a paso
El motor paso a paso es un motor de CC sin escobillas que gira en pasos. Esto es muy útil porque se puede colocar el eje del motor en un posición deseada con precisión sin ningún sensor de retroalimentación, lo que representa un controlador de bucle abierto.
Empieza a estudiar robótica
Si te apasiona la tecnología y la creatividad, la robótica es para ti
50
%
Off
Horas
Minutos
Segundos
Aplicaciones motores paso a paso
Los motores paso a paso se utilizan en una amplia variedad de aplicaciones robóticas debido a su capacidad de proporcionar un movimiento preciso y repetible en una amplia variedad de configuraciones de robot. Algunas de las aplicaciones comunes de los motores paso a paso en la robótica incluyen:
- Impresoras 3D: Los motores paso a paso se utilizan para controlar el movimiento de los cabezales de impresión en las impresoras 3D, proporcionando un control preciso del movimiento y la posición.
- Robots de soldadura: Los motores paso a paso se utilizan para controlar el movimiento y la posición de los cabezales de soldadura en los robots de soldadura, permitiendo una soldadura precisa y consistente.
- Máquinas de corte: Los motores paso a paso se utilizan para controlar el movimiento de las cuchillas en las máquinas de corte, permitiendo un corte preciso y repetible.
- Robots de ensamblaje: Los motores paso a paso se utilizan para controlar el movimiento y la posición de las piezas en los robots de ensamblaje, permitiendo un ensamblaje preciso y consistente.
- Robótica médica: Los motores paso a paso se utilizan en la robótica médica para controlar el movimiento y la posición de los instrumentos quirúrgicos, permitiendo una cirugía precisa y segura.
Consejos para la selección de motores de robots
La selección del motor correcto es un aspecto importante en el diseño de robots. Aquí te presento algunos consejos para seleccionar motores adecuados:
- Considera el tamaño y el peso del robot: El motor debe ser lo suficientemente potente para mover el peso del robot y todos sus componentes, además, ser capaz de mover la carga útil calculada.
- Determine el tipo de movimiento requerido: Los motores pueden ser lineales, rotativos o servo. Debes seleccionar el tipo de motor que mejor se adapte al tipo de movimiento requerido.
- Verifica la velocidad y el torque: El motor debe ser capaz de proporcionar suficiente velocidad y torque para las operaciones del robot.
- Revisa la eficiencia energética: Los motores más eficientes energéticamente son preferibles, ya que ayudan a prolongar la vida útil de las baterías y reducen el costo de operación.
- Verifica la disponibilidad y el costo: Asegúrate de que el motor seleccionado esté disponible en el mercado y que su costo sea adecuado para tu presupuesto.
- Considera la facilidad de control: El motor debe ser fácil de controlar y debe ser compatible con los sistemas electrónicos y de control utilizados en el robot.
- Comprueba la durabilidad: Asegúrate de que el motor seleccionado sea lo suficientemente resistente para soportar el desgaste y la tensión a lo largo del tiempo.
- Exactitud: Considere si puede hacer que los actuadores se mueven exactamente donde usted quiere.
- Repetibilidad: El motor de un robot debería poder alcanzar las posiciones comandadas una y otra vez con una precisión infalible.