El curso empieza de manera gradual revisando conceptos básicos, uso de cámaras e interfaces de usuario mediante Tkinter. En la siguiente sección se revisa el ensamblaje de dos robots móviles de tipo diferencial y omnidireccional que serán controlados de diferentes maneras, robot seguidor de línea, robot seguidor de color y forma, robot seguidor de rostros, robot seguidor de cualquier tipo de objeto y finalmente estimar la distancia que existe entre un objeto y una cámara.
SECCIÓN 1: CONCEPTOS BASICOS
En esta sección se revisa el uso de cámaras alámbricas e inalámbricas (IP) que son usadas para el control con cámara fija y cámara en mano respectivamente, herramientas que sirven para capturar, recortar, escalar imágenes y también se revisa como incorporar openCV con Tkinter, finalmente se analiza las coordenadas en el plano de la imagen vs el plano del robot.
[bg_collapse view=»link» color=»blue» icon=»arrow» expand_text=»Ver más» collapse_text=»Ver menos» ]
SECCIÓN 2: ENSAMBLAJE DE ROBOTS
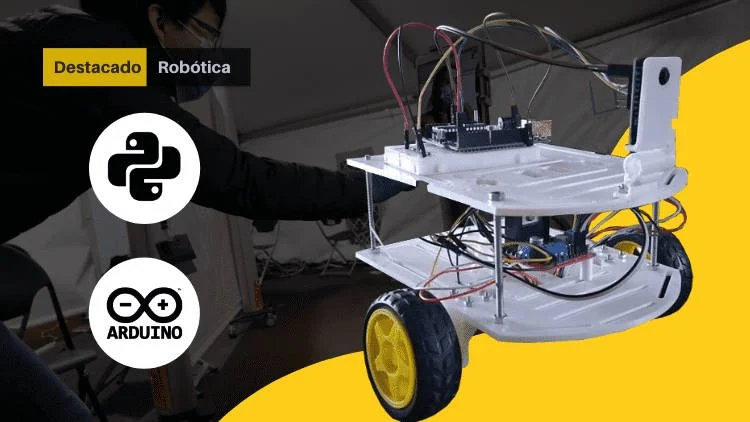
En esta sección el alumno va a ensamblar y programar dos robots móviles (diferencial y omnidireccional). Repasaremos brevemente el uso de enconders de cuadratura para determinar la velocidad angular de cada motor, se obtendrá el modelo dinámico de cada motor basado en la respuesta de un sistema de primer orden y mediante este modelo se implementa un algoritmo de control PID sintonizado mediante un novedoso método de sintonía llamado LAMBDA. Todos los componentes serán controlados por el cerebro del robot (Arduino) y finalmente montaremos todos los componentes en una estructura impresa en 3D. Todo lo mencionado se revisa de manera breve, si desea revisar detalladamente debe inscribirse primero en los cursos:
- Robot móvil tipo diferencial
- Robot móvil tipo omnidireccional de 3 ruedas
SECCIÓN 3: ROBOT SEGUIDOR DE LINEA NEGRA
En esta sección el alumno aprenderá a diseñar algoritmos de control para resolver el problema de seguimiento de línea negra. Se utiliza la técnica Thresholding para detectar la línea negra. Para el procesamiento de imagen se usa transformaciones morfológicas, filtro de tamaño, para la segmentación se usa contornos y para encontrar un punto de control se usa el centroide de la línea calculado mediante momentos de la imagen.
SECCIÓN 4: ROBOT SEGUIDOR DE COLOR
En esta sección el alumno aprenderá a diseñar algoritmos de control para resolver el problema de seguimiento de colores. Primero se transforma la imagen de BGR a HSV y se utiliza una interfaz de usuario completa para determinar los valores máximos y mínimos HSV para aplicar una máscara y encontrar el color deseado. Una vez encontrado el color se aplica filtros para eliminar ruido y posteriormente extraer características útiles para el control.
SECCIÓN 5: ROBOT SEGUIDOR DE COLOR Y FORMA
En esta sección el alumno aprenderá a diseñar algoritmos de control para resolver el problema de seguimiento de colores y forma. El objetivo de identificar formas es saber cuál es el robot y cuál es la meta a seguir. Para identificar la forma se usa características de un contorno, perímetro y aproximación de vértices.
SECCIÓN 6: ROBOT SEGUIDOR DE ROSTROS
En esta sección el alumno aprenderá a diseñar algoritmos de control para resolver el problema de seguimiento de rostros. Para identificar el rostro se usa clasificadores en cascada y descriptores Haar. El proceso de entrenamiento se realiza mediante una aplicación llamada Cascade Trainer. Aquí se proporciona todas las herramientas y el proceso correcto para llevar a cabo esta tarea.
SECCIÓN 7: ROBOT SEGUIDOR DE CUALQUIER OBJETO
En esta sección el alumno aprenderá a detectar cualquier tipo de objeto y como prueba se realizará la detección de señales de tránsito. Las señales que vamos a detectar son giro a la izquierda, giro a la derecha y la señal de parada utilizando clasificadores en cascada y descriptores Haar. El proceso de entrenamiento se realiza paso a paso mediante una aplicación llamada Cascade Trainer. Aquí se proporciona todas las herramientas y el proceso correcto para llevar a cabo esta tarea.
SECCIÓN 8: DISTANCIA ENTRE UNA CAMARA Y UN OBJETO
En esta sección el alumno aprenderá a determinar la distancia en metros que existe entre una cámara y un objeto mediante el modelo pinhole de la cámara. Para este fin en primer lugar se va a determinar la distancia focal de la cámara y posteriormente se puede determinar la distancia de un objeto con ancho o alto específico.
[/bg_collapse]

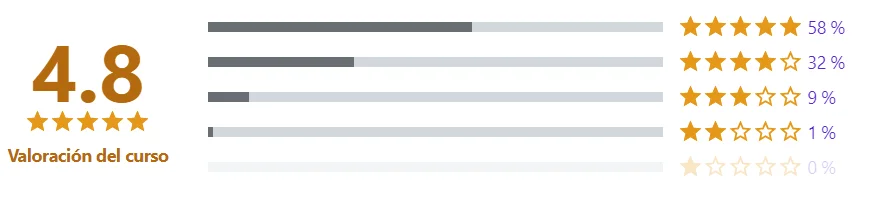





Valoraciones
No hay valoraciones aún.