Control de posición de vehículos aéreos no tripulados
¿Qué es un vehículo aéreo no tripulado UAV?
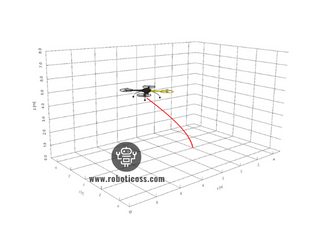
Figura 1. Vehículo aereo no tripulado (UAV)
Los UAV son aeronaves capaces de volar sin necesidad de un pilotohumano abordo que las controle. Pueden ser remotamente controlados o volar de forma autónoma basado en planes de vuelo pre-programados mediante el uso de sistemas de control complejos.
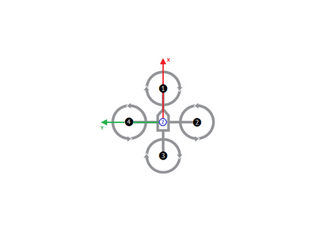
Este movimiento es proporcionado por el aumento (o disminución) de velocidad de todas las hélices en la misma cantidad generando una fuerza vertical que sube, baja o mantiene suspendido el cuadricóptero respecto a su propio sistema inercial.
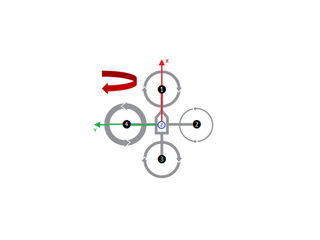
Alabeo o roll
Este movimiento es proporcionado por el aumento (o disminución) de velocidad de la hélice izquierda y por disminución (o aumento) de la velocidad en la hélice derecha. Esto produce un par de torsión con respecto al eje x que hace girar el cuadricóptero como se muestra en la Figura.
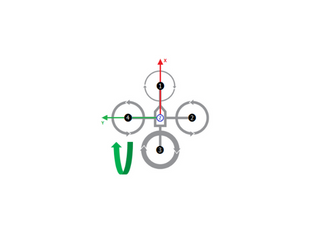
Cabeceo o pitch
Este movimiento es muy similar al roll y se genera mediante el aumento (o disminución) la velocidad de la hélice posterior y por la disminución (o aumento) de la delantera. El par de torsión con respecto al eje 𝑦 hace girar el cuadricóptero como se muestra en la Figura.
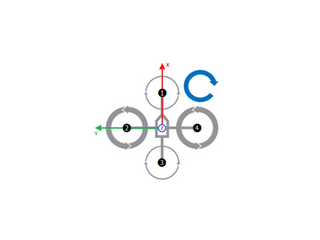
Guiñada o yaw
Este movimiento es proporcionado por el aumento (o disminución) velocidad de la hélice delantera y trasera y por la disminución (o aumento) de la hélice de la izquierda y derecha. Esto conduce a un par de torsión con respecto al eje z que hace girar el cuadricóptero como se muestra en la Figura
Niveles de control jerárquico
En general, existen tres niveles de control en los UAV, cada uno con diferentes técnicas de control, como se muestra en la Figura. Estos esquemas de control suelen trabajar de forma coordinada ya que la mayoría de ellos incluyen estrategias basadas en modelos que dependen del tipo de UAV.
El control de alto nivel es normalmente un algoritmo de planificación de caminos o trayectorias, responsable de generar un camino o trayectoria especificada por algunos criterios, por ejemplo, energía mínima, tiempo mínimo, evasión de obstáculos.
Control de nivel medio
En el control de nivel medio, se utilizan principalmente dos tipos de estrategias de control: (a) Control de seguimiento de trayectoria, donde la referencia se parametriza en el tiempo (el UAV debe estar en un punto determinado en un momento determinado) y, (b) Seguimiento de la camino, donde la referencia no está parametrizada en el tiempo, y el UAV debe seguir la ruta con la velocidad deseada.
Control de nivel medio
El control de bajo nivel es básicamente el sistema de control de propulsión, así como los servomotores que mueven diferentes partes, por ejemplo, las aletas en los UAV de ala fija y el control de rotores.
Diseño de controladores
El modelo mostrado en la Figura describe el comportamiento físico del cuadricóptero, a partir de este modelo se puede realizar el diseño del controlador.
Control de posición
El control de posición consiste en ubicar al robot en un punto de referencia deseado, con o sin una orientación deseada.
Implementa este control en un robot físico
Arduino| Odometría | Visión por computador | Ingeniería de control
Para el diseño del algoritmo de control se utiliza la teoría de Lypunov. El resultado se muestra en la ecuación de abajo. Donde K es una matriz definida positiva (generalmente diagonal), he es el error y J es la matriz Jacobiana.
Usamos cookies para asegurar que te damos la mejor experiencia en nuestra web. Si continúas usando este sitio, asumiremos que estás de acuerdo con ello.AceptarPolítica de privacidad