Brazo robótico impreso en 3D con Arduino
Hace algunos años, construir un brazo robótico parecía algo reservado para ingenieros y laboratorios. Hoy, gracias a la impresión 3D y a Arduino, cualquier persona puede crear su propio robot desde casa utilizando componentes económicos y fáciles de conseguir.
En este tutorial aprenderás a construir un brazo robótico impreso en 3D con Arduino, ideal para estudiantes, docentes y entusiastas de la robótica. El proyecto utiliza tres servomotores SG90 y una estructura fabricada mediante impresión 3D, lo que facilita tanto el montaje como futuras modificaciones.
Lo mejor de todo es que no necesitas experiencia previa en programación. Utilizaremos programación por bloques con PictoBlox, una herramienta visual que permite controlar el brazo robótico de forma sencilla mientras aprendes conceptos fundamentales de electrónica, programación y robótica.
Materiales
Para construir este brazo robótico impreso en 3D con Arduino necesitaremos algunos componentes electrónicos y elementos de montaje. Todos los materiales son fáciles de conseguir y perfectos para quienes desean iniciarse en la robótica educativa.
- 1 × Arduino UNO
- 3 × Servomotores SG90
- 1 × Fuente de alimentación de 5V 2A
- 1 x Conector adaptador de alimentación jack hembra de 5 mm con bornera.
- 1 × Protoboard pequeño
- 1 × Juego de cables jumper macho-macho de 10 cm (20 unidades)
- 11 × Tornillos M3 × 10 mm con tuerca
- 2 × Tornillos autorroscante M3.5 × 12.7 mm
- 1 Destornillador
Con estos materiales estaremos listos para comenzar el ensamblaje y la programación del proyecto.
Calibración de los servomotores
Antes de ensamblar el brazo robótico, es necesario calibrar los servomotores. Este paso permitirá que todas las piezas queden alineadas correctamente y evitará problemas durante el montaje.
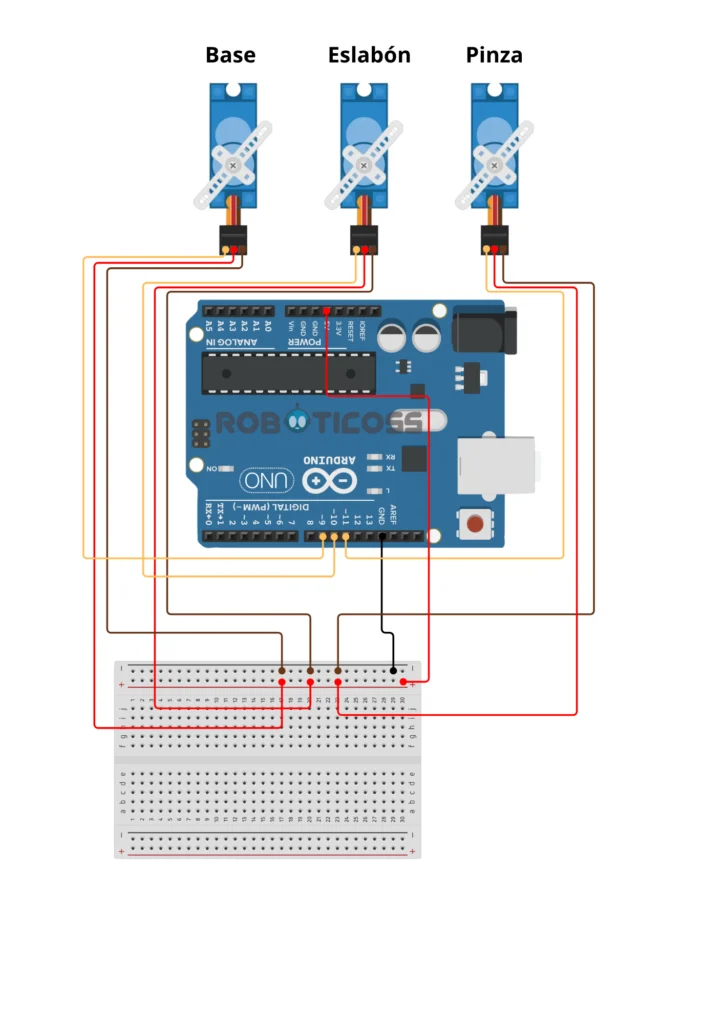
Lo primero que debes hacer es realizar las conexiones mostradas en el siguiente diagrama:
- Pin 9 → Servo de la base
- Pin 10 → Servo del eslabón
- Pin 11 → Servo de la pinza
Una vez realizadas las conexiones, carga el firmware de PictoBlox en tu Arduino. Este proceso solo se realiza una vez y permitirá establecer la comunicación entre Arduino y el modo Escenario.
¿Es tu primera vez utilizando el modo Escenario? Te recomendamos revisar primero el tutorial Cómo conectar Arduino con PictoBlox usando el modo Escenario, donde aprenderás a cargar el firmware y establecer la comunicación entre Arduino y la computadora paso a paso.
A continuación, carga el programa de calibración mostrado en la siguiente imagen. El código ha sido desarrollado mediante programación por bloques utilizando PictoBlox.
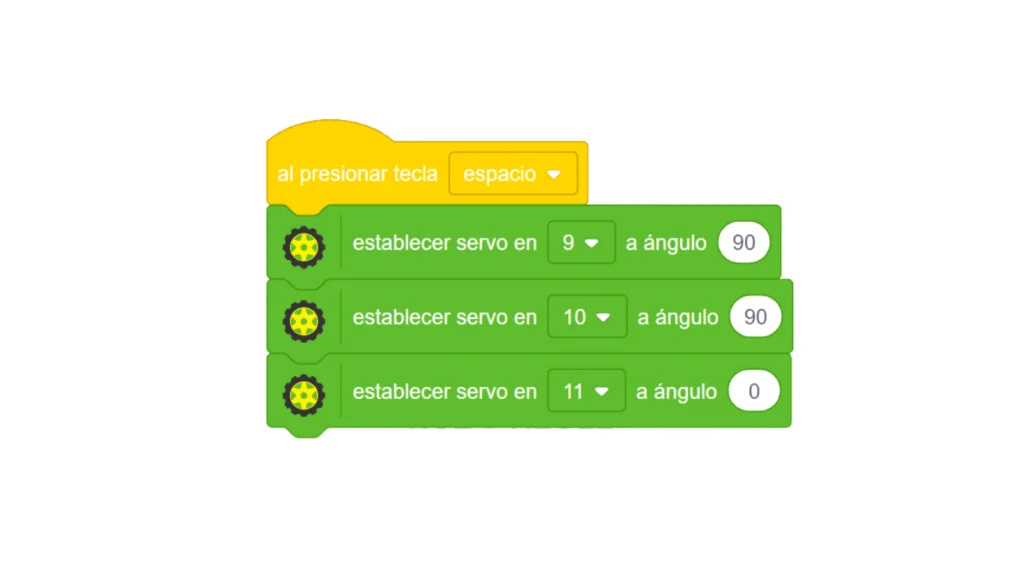
Cuando la conexión esté establecida, presiona la tecla Space para iniciar la calibración de los servomotores. Automáticamente se moverán a sus posiciones iniciales:
- Base → 90°
- Eslabón → 90°
- Pinza → 0°
Una vez completada la calibración, evita mover manualmente los servomotores. Estas posiciones serán utilizadas como referencia durante el ensamblaje del brazo robótico.
Nota: Para evitar confusiones durante el montaje, se recomienda etiquetar los servomotores como Base, Eslabón y Pinza utilizando una pequeña cinta adhesiva o cualquier otro método de identificación. Esto facilitará el ensamblaje en los siguientes pasos.

Montaje del brazo robótico
La estructura de este brazo robótico impreso en 3D con Arduino ha sido fabricada mediante impresión 3D en material PLA. Por su parte, la base ha sido diseñada para ser construida mediante corte láser utilizando MDF de 3 mm.
Los archivos STL para impresión 3D y los archivos DXF para corte láser pueden descargarse desde el siguiente botón.
[DESCARGAR ARCHIVOS STL Y DXF]
Una vez descargados los archivos, encontrarás todas las piezas necesarias para construir el proyecto. Además, se incluyen fotografías de referencia donde podrás identificar las piezas, verificar la cantidad que debes fabricar y conocer la orientación correcta de cada componente.
Cuando tengas todas las piezas listas y los servomotores calibrados, sigue el video de montaje mostrado a continuación. En él encontrarás el proceso completo de ensamblaje paso a paso.
Durante el montaje, asegúrate de respetar la posición inicial de calibración para garantizar una correcta alineación de las articulaciones del brazo robótico.
Diagrama de conexiones
El siguiente diagrama muestra las conexiones finales del proyecto. Estas son muy similares a las utilizadas durante la etapa de calibración de los servomotores.
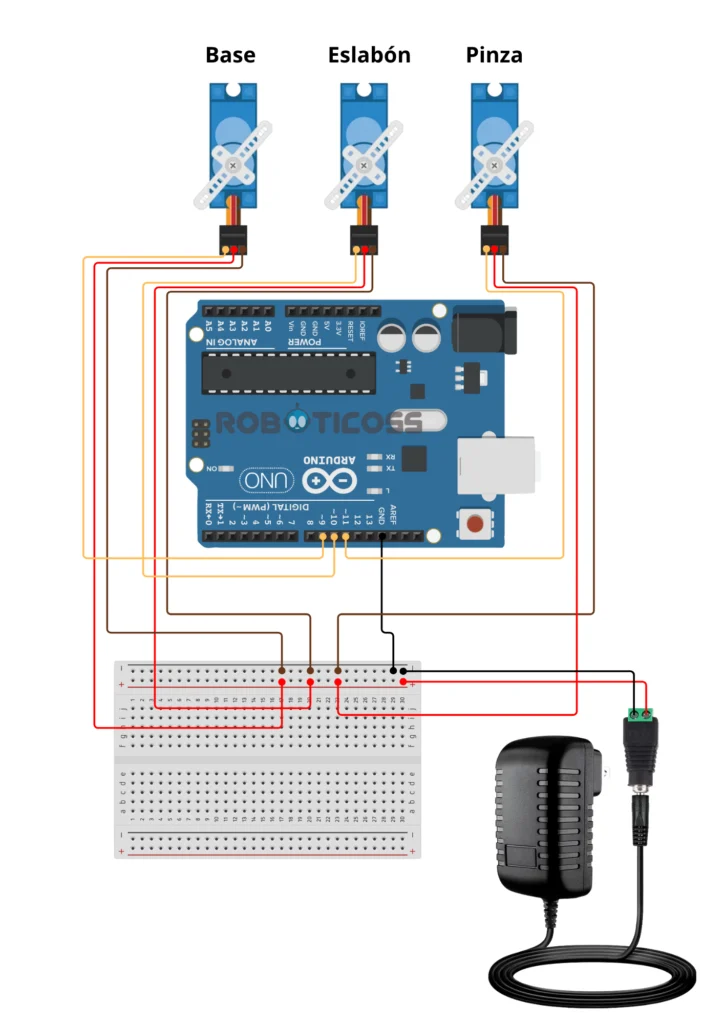
La principal diferencia es que ahora utilizaremos una fuente de alimentación externa de 5V y 2A para alimentar los servomotores. Esto es necesario porque, una vez ensamblado el brazo robótico, los motores trabajarán bajo carga y demandarán una corriente mayor a la que Arduino puede suministrar de forma segura.
Gracias a esta alimentación independiente, los servomotores tendrán la energía necesaria para mover las articulaciones del brazo de forma estable y evitarán reinicios o comportamientos inesperados en Arduino.
Importante: No olvides conectar el terminal GND de la fuente de alimentación con el GND de Arduino. De esta manera, ambos sistemas compartirán la misma referencia eléctrica y funcionarán correctamente.
Programación del brazo robótico
Con las conexiones completadas, es momento de programar nuestro brazo robótico impreso en 3D con Arduino.
Seguiremos trabajando en el modo Escenario de PictoBlox, lo que nos permitirá controlar el brazo robótico directamente desde la computadora utilizando el teclado.
A continuación encontrarás una imagen con el programa completo. Simplemente replica los bloques tal como se muestran y verifica que Arduino se encuentre correctamente conectado.

🧠 IA Educativa desde cero
Explora nuestros eBooks educativos con proyectos guiados paso a paso para enseñar inteligencia artificial desde casa o en el aula.
Una vez finalizada la programación, podrás controlar las diferentes articulaciones del brazo robótico mediante las teclas definidas dentro del programa.
Pruebas Experimentales
Ha llegado el momento de probar nuestro brazo robótico impreso en 3D con Arduino.
Para iniciar el programa, presiona la bandera verde en PictoBlox. Automáticamente el brazo robótico se moverá a la posición Home, definida durante la programación.
A continuación, utiliza el teclado para controlar las diferentes articulaciones del robot:
- Flecha izquierda → Girar la base hacia la izquierda.
- Flecha derecha → Girar la base hacia la derecha.
- Flecha arriba → Subir el brazo.
- Flecha abajo → Bajar el brazo.
- Tecla A → Abrir la pinza.
- Tecla S → Cerrar la pinza.
Mientras realizas las pruebas, podrás observar cómo las variables joint1, joint2 y gripper cambian en tiempo real dentro del escenario de PictoBlox. Esto te permitirá comprender mejor cómo el programa controla cada uno de los servomotores.
Como mejora futura, te recomiendo agregar límites para evitar que las variables superen los 180° o sean menores que 0°. Aunque el programa seguirá funcionando, mantener estos rangos ayudará a evitar movimientos no deseados.
Este es solo el comienzo. En los próximos proyectos seguiremos añadiendo nuevas funcionalidades y desarrollando aplicaciones más avanzadas utilizando este brazo robótico.
🧠 IA Educativa desde cero
Explora nuestros eBooks educativos con proyectos guiados paso a paso para enseñar inteligencia artificial desde casa o en el aula.