Encuentra tu pasión a solo 4,17 US$/mes | Aprende Robótica, IA e IOT.
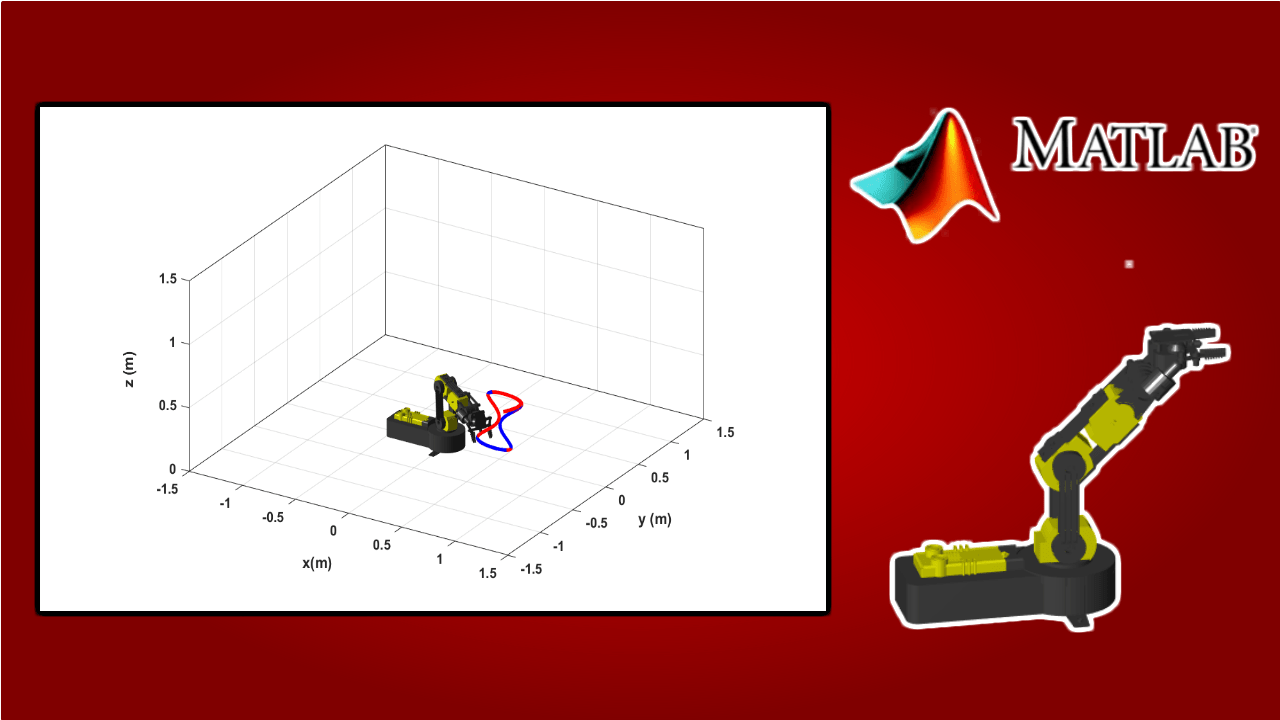
Trajectory Tracking Control of a robotic arm (4DOF) on Matlab
$4.99
? The controller design is based on a kinematic model of the robotic arm of 4 degree of freedom which accepts velocity inputs (rad/s), as it is usual in commercial robots.
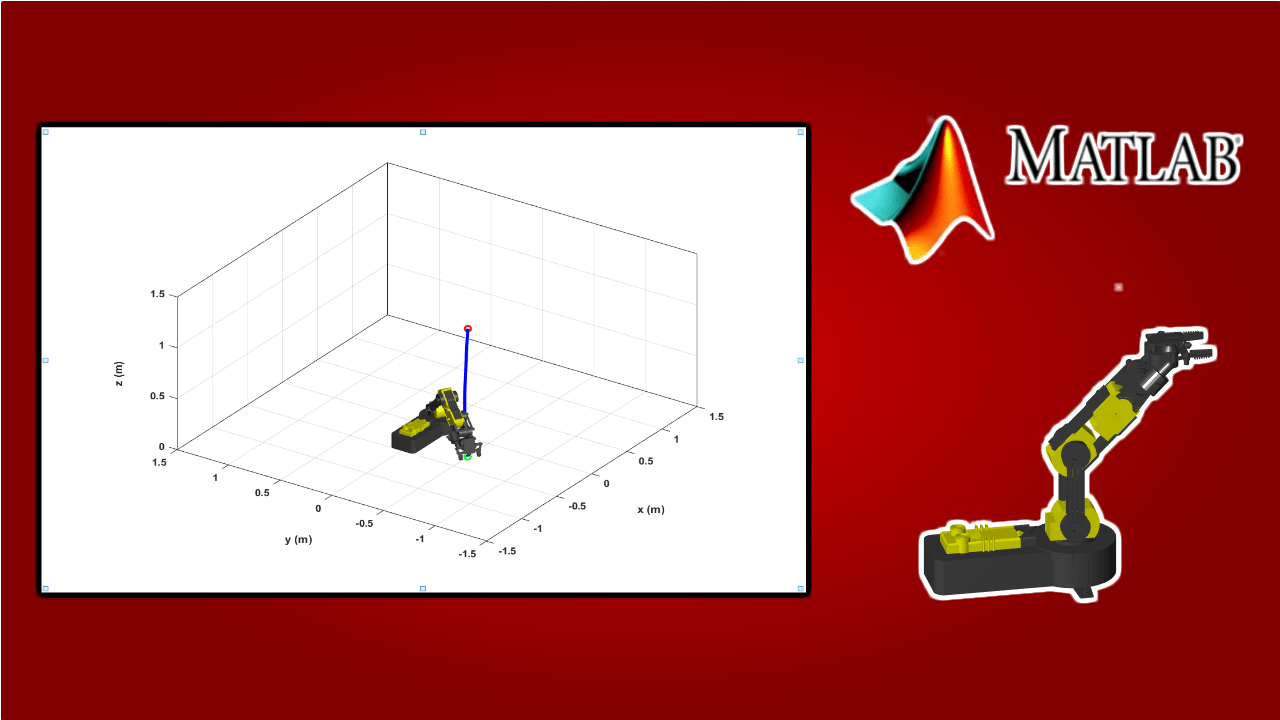
? The results obtained are evaluated in a virtual reality simulation environment on Matlab software.
This product include:
✅ Kinematic model (Jacobian)
✅ Controller based on a kinematic model (Lyapunov)
✅ Function to read stl files
✅ Simulator 3D of the robotic arm (Johnny Dao)
? El diseño del controlador se basa en un modelo cinemático del brazo robótico de 4 grados de libertad que acepta entradas de velocidad (rad/s), como es habitual en los robots comerciales.
? Los resultados obtenidos se evalúan en un entorno de simulación de realidad virtual en el software Matlab.
Este producto incluye:
✅ Modelo cinemático (Jacobiano)
✅ Controlador basado en un modelo cinemático (Lyapunov)
✅ Función para leer archivos stl
✅ Simulador 3D del brazo robótico (Johnny Dao)
Productos relacionados
-
-
¡Oferta!
Control PID con Arduino y Python
El precio original era: $69.99.$29.99El precio actual es: $29.99. -
¡Oferta!
Kit Sistema de Luminosidad | Sistemas de control | Arduino
El precio original era: $34.99.$29.99El precio actual es: $29.99.
Valoraciones
No hay valoraciones aún.