Robot evasor de obstáculos para niños con Arduino fácil y divertido
Un día, mientras jugábamos con materiales simples en casa, surgió una idea: ¿y si creamos un robot que pueda moverse solo y evitar chocar con todo?
Con un poco de cartón, algunos componentes y un Arduino, ese pequeño experimento se convirtió en algo sorprendente: un robot capaz de esquivar obstáculos por sí mismo.

En este proyecto, no solo vas a construir tu propio robot evasor de obstáculos, sino que también descubrirás lo divertido que puede ser aprender robótica desde cero.
Materiales
Para construir este robot evasor de obstáculos para niños, vas a necesitar materiales sencillos y fáciles de conseguir:
Electrónica
- 1 Arduino Uno
- 2 servomotores SG90 de 360° (rotación continua)
- 1 sensor ultrasónico HC-SR04
- 1 batería de 9V (de preferencia recargable)
- 1 conector para batería con plug
- 6 jumpers macho-macho (10 cm)
- 2 jumpers hembra-hembra (10 cm)
- 2 jumpers macho-hembra (10 cm)
Estructura (chasis)
- Cartón resistente
- 1 rueda loca pequeña
Herramientas
- Tijeras
- Compás grande (para hacer cortes circulares precisos)
- Silicona
Construcción del chasis del robot
En esta parte vamos a construir el cuerpo de nuestro robot utilizando cartón. ¡Es más fácil de lo que parece!
Paso 1: Dibujar y cortar las piezas
- Dibuja un círculo grande de 16 cm de diámetro sobre el cartón (este será el chasis).
- Luego dibuja 4 círculos pequeños de 4.5 cm de diámetro (serán las ruedas).
- Recorta todas las piezas con cuidado.
Paso 2: Ajuste para las ruedas
En el círculo grande (chasis), realiza dos recortes laterales donde irán las ruedas.
Estos espacios deben coincidir con el tamaño de las ruedas para que puedan girar libremente.

Paso 3: Colocar la rueda loca
- Pega la rueda loca en la parte trasera del chasis usando silicona.
- Esta rueda ayudará a mantener el equilibrio del robot.
Paso 4: Instalar los servomotores
- Coloca los servomotores SG90 de 360° en los laterales del chasis.
- Asegúrate de que estén bien alineados.
- Fíjalos con silicona para que no se muevan.
Paso 5: Construir las ruedas
- Une dos círculos pequeños para formar una rueda más gruesa.
- Repite el proceso para tener dos ruedas.
- Pega cada rueda al acople del servomotor con silicona.
Paso 6: Colocar el sensor ultrasónico
- Ubica el sensor ultrasónico en la parte delantera del robot.
- Pégalo con silicona, asegurándote de que quede mirando hacia el frente.
¡Listo! Ya tienes el chasis de tu robot armado. Ahora tu robot tiene forma, ruedas y “ojos” para detectar obstáculos.
Diagrama de conexiones
Ahora que nuestro robot ya tiene forma, es momento de darle “vida” conectando todos los componentes electrónicos.
Para realizar las conexiones, simplemente sigue el esquemático mostrado en la imagen presentada.
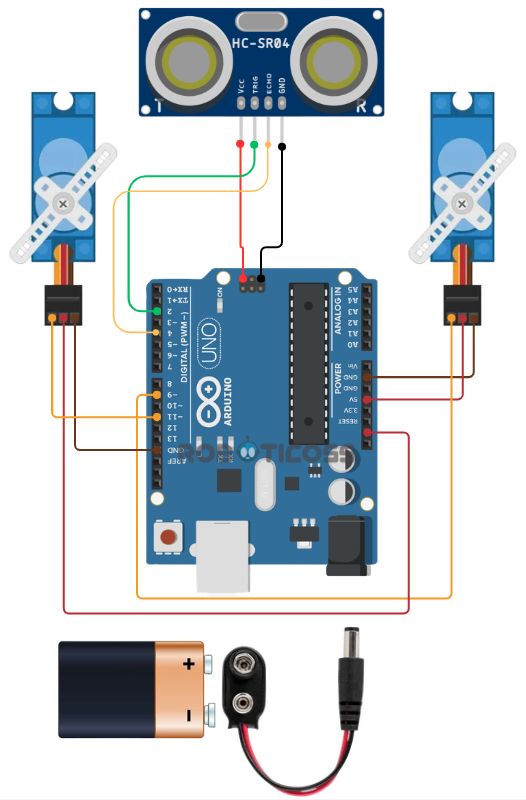
Observa con atención la posición de:
- Los servomotores SG90
- El sensor ultrasónico HC-SR04
- La alimentación del Arduino
- Y los cables jumper
Realiza las conexiones con calma y verifica que cada cable esté correctamente conectado antes de encender el robot.
Programación del robot
¡Llegó el momento más divertido! Ahora vamos a programar nuestro robot para que pueda detectar obstáculos y evitarlos automáticamente.
Para esta práctica estamos utilizando el software PictoBlox, el cual permite programar Arduino utilizando bloques de manera sencilla e ideal para niños.
Si todavía no sabes cómo utilizar este programa, primero revisa estos tutoriales antes de continuar:
Una vez que entiendas esos conceptos básicos, regresa a este proyecto y realiza la programación tal como se muestra en la imagen del código.
🧠 IA para Niños desde cero
Explora nuestros eBooks educativos con proyectos guiados paso a paso para enseñar inteligencia artificial desde casa o en el aula.

¿Cómo funciona el programa?
El funcionamiento del robot es bastante sencillo:
El programa está constantemente leyendo la distancia detectada por el sensor ultrasónico HC-SR04.
Cuando detecta un obstáculo
El código compara si la distancia medida es menor a 15 cm.
Si esto ocurre:
- El robot deja de avanzar.
- Luego gira hacia el lado izquierdo.
- Después realiza una pequeña pausa para darle tiempo al giro.
- Finalmente vuelve a avanzar hacia adelante.
Cuando no hay obstáculos
Si la distancia es mayor a 15 cm:
- El robot continúa avanzando normalmente.
Pequeño retardo
Al final del programa se agrega un pequeño retardo para estabilizar la lectura del sensor ultrasónico y evitar movimientos bruscos o lecturas incorrectas.
Pruebas Experimentales
¡Es momento de probar nuestro robot!
Una vez terminada la programación, debes cargar el código al Arduino tal como se explica en el tutorial de cómo programar Arduino con bloques usando PictoBlox.
Cuando el código haya sido cargado correctamente, coloca el robot sobre una superficie plana y enciéndelo.
¿Qué debemos observar?
El comportamiento del robot debe ser el siguiente:
- El robot avanzará hacia adelante automáticamente.
- Cuando detecte un obstáculo cerca utilizando el sensor ultrasónico:
- Se detendrá por un instante.
- Girará hacia el lado izquierdo.
- Luego continuará avanzando nuevamente.
Puedes probar colocando objetos como cajas, botellas o tu mano frente al robot para observar cómo evita los obstáculos.
Recomendaciones durante las pruebas
- Verifica que las ruedas giren correctamente.
- Comprueba que el sensor ultrasónico esté apuntando hacia el frente.
- Asegúrate de que la batería tenga suficiente carga.
- Si el robot gira al lado incorrecto, puedes intercambiar el sentido de los servomotores en la programación.
Si todo está correctamente conectado y programado, tendrás un robot móvil capaz de desplazarse solo y evitar obstáculos automáticamente.
🧠 IA Educativa desde cero
Explora nuestros eBooks educativos con proyectos guiados paso a paso para enseñar inteligencia artificial desde casa o en el aula.